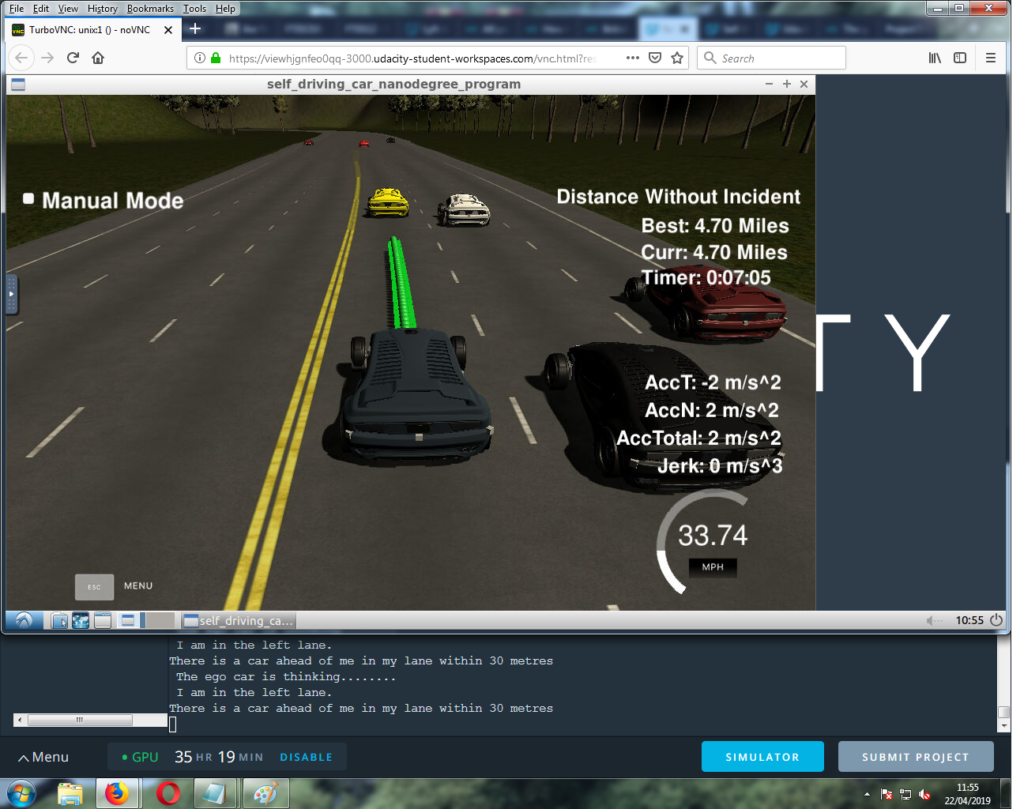
 Of course it was not so simple and plenty went wrong. For example our car (called “the ego car” in a touch of Udacity humor) would often crash into the back of slow moving traffic. This was because on one hand we wanted to avoid sudden acceleration and deceleration but on the other hand not too crash. When we set up our program to do that we created the possibility that the car might not stop fast enough if there was very slow moving traffic ahead.
Of course it was not so simple and plenty went wrong. For example our car (called “the ego car” in a touch of Udacity humor) would often crash into the back of slow moving traffic. This was because on one hand we wanted to avoid sudden acceleration and deceleration but on the other hand not too crash. When we set up our program to do that we created the possibility that the car might not stop fast enough if there was very slow moving traffic ahead.
So I thought about what we actually do in real driving. What I do is try to look far ahead and make small adjustments early in plenty of time, maybe just easing off the throttle a little bit. If I get closer to something I want to avoid I slow down a bit harder maybe braking or dropping gear. If I am really near I will brake and if it is an emergency I will do an emergency stop. I took those ideas and implemented them in C++.
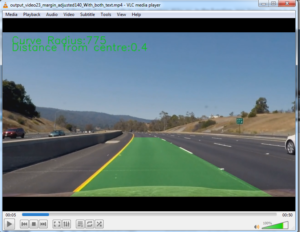
What that involved was doing an number of checks using sensor input to determine how close something was ahead and setting so status to “within 40m” , “within 30m”, “within 15m” or “within 5 m”. With 4 levels of distance I created 4 corresponding levels of speed adjustment . There was a penalty from the simulator if we collided or decelerated too hard but I decided it was better to get penalized for braking hard than colliding and this was the whole point of the project, to think about what decisions do you have to make and what trade offs are involved if you want to be safe but still make progress on the road.
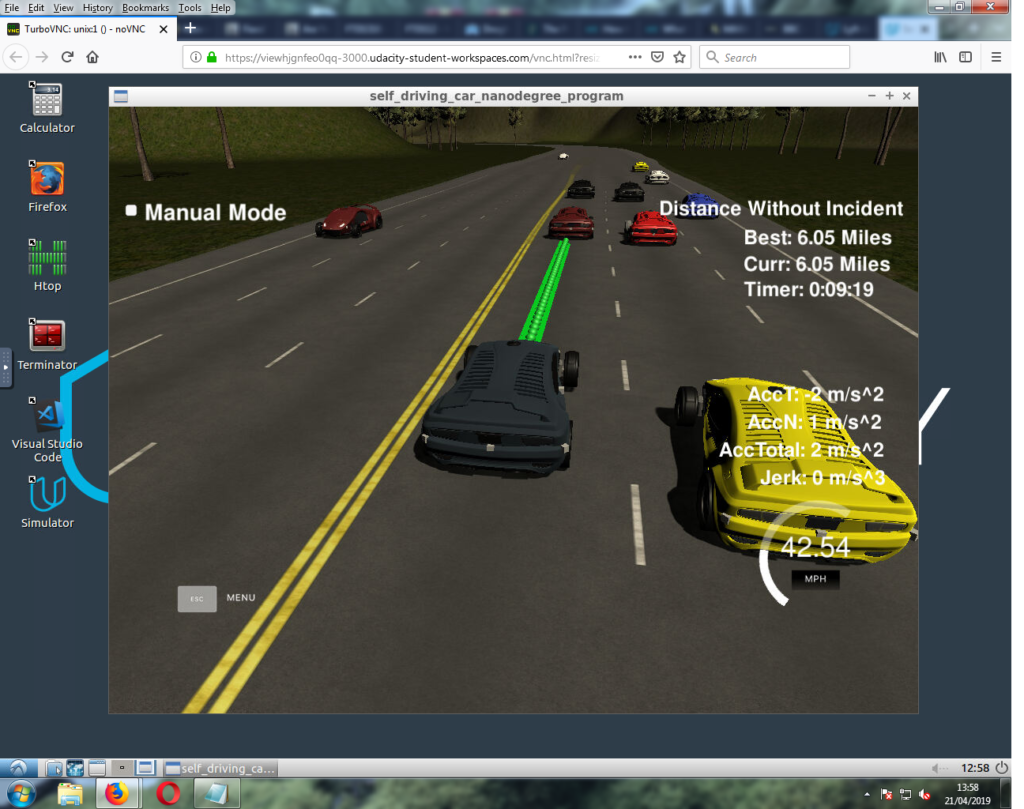
There were other problems like the car sometimes would sit between lanes, it turned out when two adjacent lanes were equally good for progress it would alternate between them every split second but the smoothing effect of the steering meant this created an average setting that kept the car between two lanes until traffic made one lane decisively worse than the other then it would move to the better lane. These kind of things took a lot of time to decipher what was going on but they were great learning experiences.
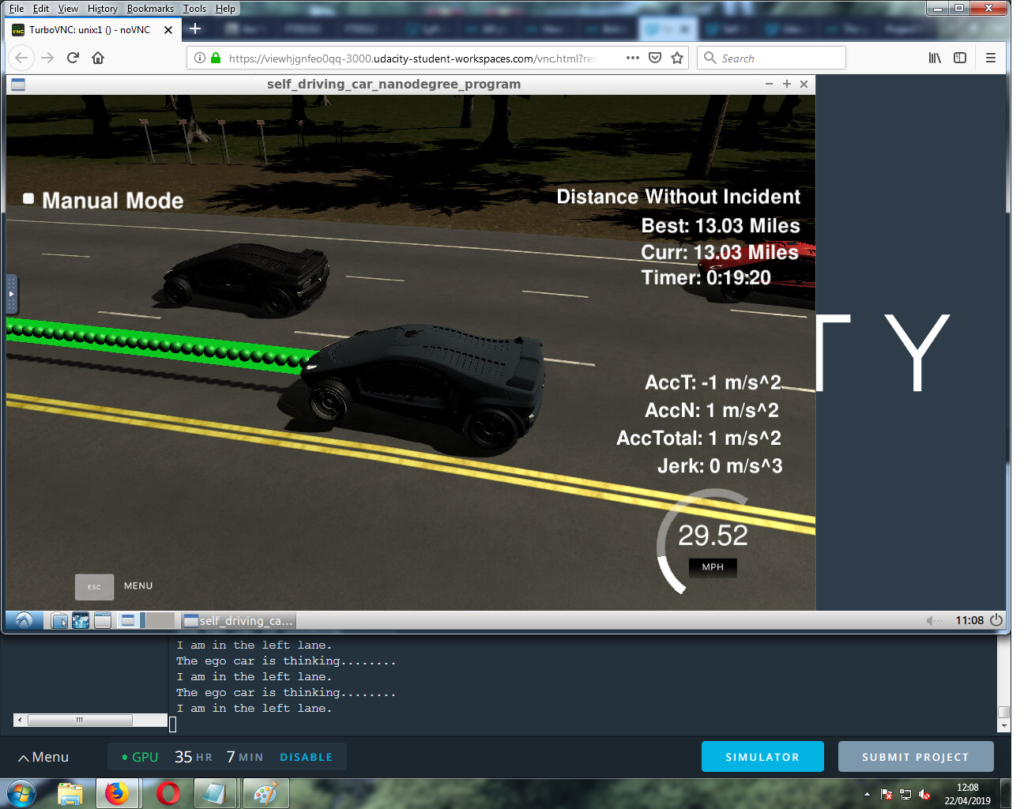
After a lot of work and experimentation the car was able to drive for 20 minutes without any penalties for collisions or sudden movements. We only needed to do it for about 5 minutes but I wanted to be sure. I did a number of over 15 minute tests and called that a success.