
PyCon_Limerick_2020
PyCon Limerick 2020 ” Adding Computer Vision to Robot Operating System (ROS)” This article is about the workshop “Adding Computer Vision to Robot Operating System”

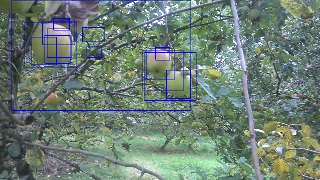
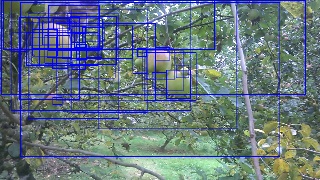
PyCon Limerick 2020 ” Adding Computer Vision to Robot Operating System (ROS)” This article is about the workshop “Adding Computer Vision to Robot Operating System”

Capstone Project Programming A Real Self Driving Car The Capstone project is where after 9 months of online lessons and projects we finally get to
Functional Safety Functional Safety is one of the electives in the course. It is the only project that does not require programming. The Nano-Degree has
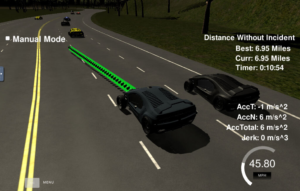
Path Planning Project In this project there was a lot to accomplish, so I had to make a check list. A year ago this would